Το ROBOT του Δημήτρη
Ένας ρομποτικός βραχίονας που
φτιάχνει Ελληνικό καφέ…
Λίγη ιστορία.
Πάντα μου άρεσε να βλέπω κάθε τι που είχε σχέση με τα ρομπότ, ταινίες περιοδικά κλπ. Όνειρο μου ήταν από μικρός να κατασκευάσω ένα μικρό ρομποτάκι. Έγινα Ηλεκτρονικός και αργότερα Προγραμματιστής και είμαι γνώστης του Hardware των Η/Υ. Η ευκαιρία μου δόθηκε πριν λίγα χρόνια και άρχισα να πραγματοποιώ το όνειρό μου. Σχεδιάζοντας και δουλεύοντας τα απογεύματα μετά την δουλειά και ύστερα από 6 μήνες είχα τα πρώτα καλά αποτελέσματα και ήμουν πολύ ευχαριστημένος θα έλεγα καλύτερα ευτυχισμένος. Χόρεψα όταν το ρομπότ μου έκανε τις πρώτες κινήσεις. Η χαρά της δημιουργίας στο φόρτε της. Το είδαν οι φίλοι μου οι γνωστοί μου, μερικοί προβληματίστηκαν, άλλοι δεν κατάλαβαν τι δουλειά και γνώσεις θέλει για να πετύχεις αυτό το αποτέλεσμα. Δεν ήξερα ποιός θα το δει για να το αξιολογήσει και ότι έκανα ήταν για την δική μου ευχαρίστηση. Έτσι πέρασε αρκετός καιρός. Εν τω μεταξύ μετακόμισα σε νέο σπίτι και αν και είχα χώρο δικό μου είχα αποσυντονιστεί. Εκεί που γυρνούσα στο internet βρήκα το site σας και διάβασα για τον διαγωνισμό. Πήρα νέο έναυσμα και άρχισα να κάνω αυτό που αγαπώ. Αμέσως τοποθέτησα στο χώρο μου μια μεγάλη ταύλα για πάγκο και έγινε το νέο εργαστήριο. Ξαναέβγαλα το σκονισμένο ρομπότ μου και με αγάπη το καθάρισα το γρασάρισα το έβαλα στον πάγκο και του έδωσα πάλι ζωή. Έκανα μερικές μικρές βελτιώσεις στο GRIP και άλλαξα τον κινητήρα του με έναν δυνατότερο ώστε να σφίγγει καλύτερα και άρχισα να προετοιμάζω και να στήνω το σκηνικό για να του μάθω μερικές νέες σύνθετες κινήσεις.  Ο χαμός στο νέο
εργαστήριο.
ΠΕΡΙΓΡΑΦΗ ΤΗΣ ΚΑΤΑΣΚΕΥΗΣ ΚΑΙ ΤΩΝ
ΤΕΧΝΙΚΩΝ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΤΟΥ ΡΟΜΠΟΤΙΚΟΥ ΒΡΑΧΙΟΝΑ
Το όλο σύστημα περιλαμβάνει 6 μέρη και είναι τα ακόλουθα: • Τα τροφοδοτικά. • Το μηχανολογικό μέρος του ρομποτικού βραχίονα. • Την ενδιάμεση ηλεκτρονική πλακέτα. • Την πλακέτα μέσα στον Η/Υ με τα 2 ολοκληρωμένα 8255 • Το πρόγραμμα που ανέπτυξα σε Visual Basic • Τον Η/Υ ( PC ) με λειτουργικό σύστημα Microsoft Windows. ΕΠΙ ΜΕΡΟΥΣ
ΑΝΑΛΥΣΗ
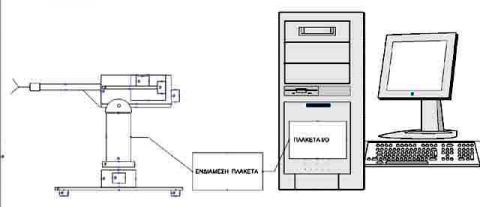 Block διάγραμμα
Τα τροφοδοτικά.
Έχω δύο τροφοδοτικά που τα ρύθμισα να βγάζουν συνεχές τάση 18 volt το ένα και 9 volt το άλλο, με ρεύμα μέχρι 2 A. Τροφοδοτούν την ενδιάμεση πλακέτα και αυτή με την σειρά της τα 3 μοτέρ με 9 volt και τα άλλα 2 με 18 volt.  Φωτογραφία των
τροφοδοτικών.
Μηχανολογικό
μέρος.
Πολλές μέρες πέρασα σκεφτόμενος και σχεδιάζοντας στο μυαλό πρώτα και μετά στο χαρτί, την μηχανική κατασκευή. Δεν ξεχνάμε την παροιμία που λέει: (δέκα φορές μέτρα μία φορά κόψε). Το ηλεκτρονικό εργαστήριο έγινε μηχανουργείο. Δράπανα κόφτες πριόνια βίδες αλουμίνια πλακέτες παχύμετρα σιλικόνες σε πλήρη δράση. Αποφάσισα να χρησιμοποιήσω για την κίνηση βηματικούς κινητήρες μιας και είχα πολλά παλαιά drive δισκέτας 5 ιντσών και παλαιούς εκτυπωτές από όπου έβγαλα πολλά step motors και γρανάζια. Ένας φίλος μηχανουργός μου έκανε στον τόρνο του με οδηγίες μου δύο ειδικές μπρούντζινες ντίζες (μακριές βίδες) με ελικοειδείς αυλακιές με βήμα 3 εκ για τους κινητήρες Β και C και ένα μεγάλο πλαστικό γρανάζι για τον κινητήρα Α. Η κατασκευή μου έχει 5 βηματικούς κινητήρες. Δηλαδή έχει 4 κινητήρες για 4 άξονες ελευθερίας και ένας κινητήρας είναι για το σφίξιμο και ξεσφίξαμο του GRIP. Η ανάλυση των κινητήρων είναι: • A κινητήρας κίνηση αριστερά δεξιά 360 μοίρες • B κινητήρας κίνηση πάνω κάτω από το δάπεδο έως 42 εκατοστά ύψος. • C κινητήρας κίνηση εμπρός πίσω 9 εκατοστά περίπου. • D κινητήρας κίνηση περιστροφή του grip αριστερά δεξιά 360 μοίρες • E κινητήρας κίνηση σφίξιμο ξεσφίξημο του GRIP 0-4 εκατοστά Η ενεργή περιοχή είναι περίπου σαν τόρος, εσωτερική διάμετρος 38 εξωτερική διάμετρος 47 και ύψος 42 εκατοστά (περίπου σαν κουλούρι γύρω από το ρομπότ).  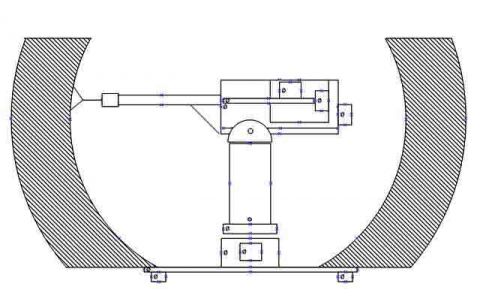 Η ωφέλιμη περιοχή λειτουργίας (γραμμοσκιασμένη) Το βάρος ανύψωσης είναι περίπου 300
γραμμάρια, μπορεί να σηκώσει ένα μικρό πλαστικό μπουκάλι πλακέ σαμπουάν
και να το μετακινήσει μέσα στην ενεργή περιοχή του. Υπό ορισμένες συνθήκες
( πχ να είναι ο βραχίονας εντελώς πίσω μπορεί να σηκώσει και 500
γραμμάρια.)
Στις επόμενες φωτογραφίες φαίνεται το ρομπότ να σηκώνει το παραπάνω βάρος.   Ανύψωση βάρους 500
γραμμαρίων.
Το σασί είναι από αλουμίνιο και εποξική
πλακέτα διπλού τυπωμένου η οποία κόπηκε και τρυπήθηκε με ακρίβεια και
κολλήθηκε και από τις δύο μεριές. Ο βραχίονας είναι από μπρούντζινο
σωληνάκι που ολισθαίνει και περιστρέφεται μέσα σε αλουμινένιο σωληνάκι.
Τον μπρούτζινο βραχίονα τον διατρέχει εσωτερικά ντίζα με πάσο που δίνει
κίνηση στο GRIP. Κάθεται σε μια βαριά σιδερένια βάση για σταθερότητα και
το κύριο σώμα του περιστρέφεται γύρο από άξονα με την βοήθεια μεγάλου
πλαστικού γραναζιού.
Οι βηματικοί κινητήρες είναι τύπου Unipolar δηλαδή με 5 ή 6 άκρα (4 τα πηνία και 1 ή 2 η τροφοδοσία) 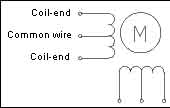 Τα πηνία των βηματικών κινητήρων
και τα άκρα τους.
Έχουν τα ακόλουθα
χαρακτηριστικά:
• Step motor Α 1,8 deg / step, μια πλήρη περιστροφή του άξονα 200 βήματα • Step motor Β 7,5 deg / step, μια πλήρη περιστροφή του άξονα 48 βήματα • Step motor C 7,5 deg / step, μια πλήρη περιστροφή του άξονα 48 βήματα • Step motor D 1,8 deg / step, μια πλήρη περιστροφή του άξονα 200 βήματα • Step motor Ε 7,5 deg / step, μια πλήρη περιστροφή του άξονα 48 βήματα Κάθε κινητήρας έχει σε κατάλληλο σημείο της περιοχής του μηχανισμού του από ένα αισθητήρα (με υπέρυθρες ή μηχανικό διακόπτη) για να καταλαβαίνει το πρόγραμμα την αρχική του θέση. Πρέπει ο κινητήρας να ξεκινά πάντα από ένα προκαθορισμένο σημείο (αφετηρία ή θέση παρκαρίσματος ή θέση μηδέν) η οποία προσδιορίζεται από τον αισθητήρα. Ακολουθούν φωτογραφίες της
μηχανικής στήριξης κάθε κινητήρα και οι αισθητήρες
θέσης.
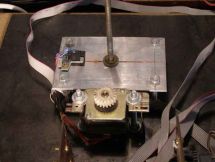
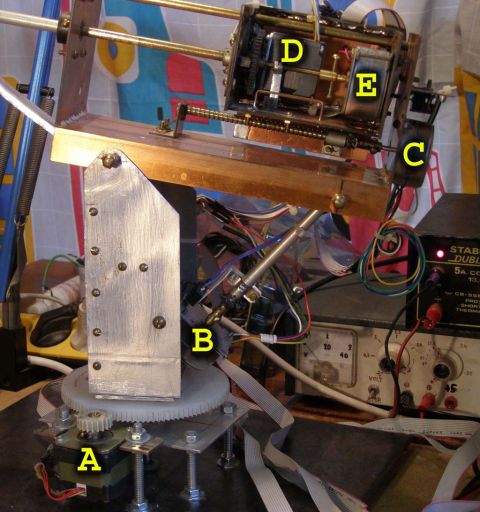 Η μηχανική στήριξη και η θέση των
πέντε βηματικών κινητήρων.
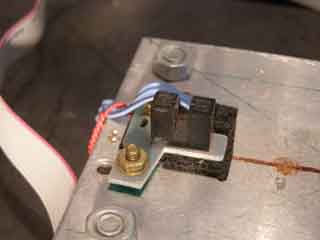 Ο αισθητήρας του Κινητήρα
Α
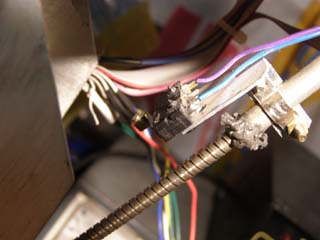 Ο αισθητήρας του Κινητήρα Β
(διακόπτης)
 Ο αισθητήρας του Κινητήρα
C
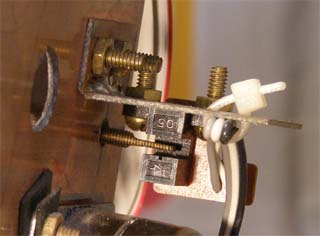
 Ο αισθητήρας του Κινητήρα
D
 Ο αισθητήρας του Κινητήρα
E
 Το μεγάλο γρανάζι
  Η βάση στήριξης και άλλες
λεπτομέρειες.
 Το GRIP
Ενδιάμεση Ηλεκτρονική
πλακέτα.
H πλακέτα αυτή περιλαμβάνει κατά πρώτον τα 5 ολοκληρωμένα ULN2003A. Αυτό το ολοκληρωμένο είναι πολύ απλό αλλά πολύ χρήσιμο. Περιλαμβάνει ομάδα τρανζίστορ ανοικτού συλλέκτη όπου συνδέονται τα πηνία των βηματικών κινητήρων παίρνοντας ρεύμα. Κατά δεύτερον η πλακέτα περιλαμβάνει τα 5 τρανζίστορ BD243C. Είναι ισχύος με ψήκτρα και λειτουργούν σαν διακόπτες που δίνουν ή κόβουν εντελώς το ρεύμα από τα step όταν δεν κινούνται. Επίσης περιλαμβάνουν το κύκλωμα των φρένων (αφήνω λίγο ρεύμα στα τυλίγματα του κινητήρα) για να μην αλλάξουν θέση μερικοί επίφοβοι κινητήρες όταν είναι σταματημένοι. Κάθε κινητήρας έχει αισθητήριο κύκλωμα με υπέρυθρες ή μηχανικό διακόπτη για να βρίσκει την αρχική θέση ή την θέση παρκαρίσματος πριν ξεκινήσει κάποια λειτουργία. Όλα τα σήματα των αισθητήρων θέσης των κινητήρων περνάνε μέσα από αυτήν την πλακέτα χωρίς να επεξεργαστούν για να καταλήξουν στον Η/Υ.  Φωτογραφία της ενδιάμεσης
Ηλεκτρονικής πλακέτας.
Η I/O πλακέτα μέσα στον
Η/Υ.
Η πλακέτα μέσα στο PC περιλαμβάνει δύο 8255 (έχουν συνολικά 48 digital input output 6Χ8 bit = 48 προγραμματιζόμενες ποιες inp και ποιες Out ) και είναι κατασκευής DECISION . Τα 8255 είναι απλά ολοκληρωμένα που μοναδική τους δουλειά είναι να συνδέουν ψηφιακά το PC με τον έξω κόσμο (δεν έχουν επάνω τους λογική).  Φωτογραφία της I/O πλακέτας μέσα
στον Η/Υ.
Το πρόγραμμα που ανέπτυξα σε
VisualBasic 5 και 6.
Γενικές πληροφορίες. Όλο το βάρος της λειτουργίας του ρομποτικού βραχίονα το έχει το πρόγραμμα που ανέπτυξα. Όλη τη λογική από την παραγωγή των κατάλληλων τετραγωνικών παλμών για την οδήγηση των τεσσάρων άκρων των βηματικών κινητήρων μέχρι την λειτουργία εκμάθησης και την αναπαραγωγή της ομάδας κινήσεων που αποτελούν μία ολοκληρωμένη λειτουργία τα κάνει αυτό το πρόγραμμα. Το λειτουργικό σύστημα της Microsoft Windows είναι Soft Real Time και δεν κάνει για απ’ ευθείας παραγωγή παλμών για την οδήγηση των βηματικών κινητήρων. Δηλαδή εκείνη την στιγμή που εμείς υπολογίζουμε και στέλνουμε παλμούς στους κινητήρες μεσολαβούν άλλες εσωτερικές διεργασίες των Windows και έτσι χάνεται ο σωστός χρονισμός.(το εύρος των παλμών και οι χρόνοι μεταξύ τους πρέπει να είναι πάντα σωστός όπως ορίζει το πρόγραμμα). Με χρήση εξωτερικού controller που αυτός θα παράγει αποκλειστικά τους χρονισμούς (όπως ο arduino ή άλλος controller) η λειτουργία των Windows θα είναι αρίστη. Κανονικά έρεπε να χρησιμοποιήσουμε Hard Real Time σύστημα (RTOS) για την δουλειά που το θέλουμε. Όμως εμείς έχουμε Windows και ξέρουμε Visual basic και αυτά θα χρησιμοποιήσουμε. Τα Windows μας δίνουν την δυνατότητα μέσω του προγραμματισμού να δώσουμε σε μια εφαρμογή που τρέχει τις κάτωθι προτεραιότητες (Low, Below Normal, Normal, Above Normal, High, Realtime).Το Realtime όμως στα Windows δεν είναι hard αλλά soft. Εάν βάλουμε στην παρούσα εφαρμογή προτεραιότητα Realtime τότε η λειτουργία περιορίζεται σε ένα νήμα και μέχρι να τερματιστεί η εφαρμογή δεν λειτουργεί ούτε και το ποντίκι. Με αυτές τις συνθήκες δεν είναι δυνατόν να δουλέψουμε και γι αυτό λοιπόν του δίνουμε μέγιστη προτεραιότητα (High priority) έναντι των άλλων παραλλήλων εφαρμογών των Windows, έτσι ώστε η κίνηση των κινητήρων να είναι ομαλή χωρίς πετάγματα κατά το δυνατόν. Πράγματι η λειτουργία με αυτόν τον τρόπο είναι αποδεκτή για την κατασκευή μας. Τεχνικές πληροφορίες του προγράμματος Σε κάθε κινητήρα αφοσιώνονται 6 bit, 5 εξόδου και 1 εισόδου και αναλύονται ως εξής: • Για τα πηνία του κινητήρα 4 bit, έξοδοι. • Για τον έλεγχο της τάσης στον κινητήρα 1 bit, έξοδος. • Για τον έλεγχο της θέσης μηδέν του κινητήρα 1 bit, είσοδος. Το πρόγραμμα παράγει όλους τους παλμούς για να οδηγήσει τα step motors. Ο τρόπος λειτουργίας τους είναι απλού βήματος hi torque (μέγιστη ροπή). Δεν προτίμησα την λειτουργία σε half step διότι ο κινητήρας θα ήταν ποιο αργός και θα έχανε σε δύναμη αν και θα είχε μεγαλύτερη ακρίβεια. H ακολουθία των παλμών είναι: • Βήμα 1ον 1001 • Βήμα 2ον 0011 • Βήμα 3ον 0110 • Βήμα 4ον 1100 Μετά το τέλους του τέταρτου βήματος ξεκινάμε πάλι από το πρώτο βήμα κοκ. Μεταξύ των βημάτων παρεμβάλλεται πάντα ανάλογο ρυθμιζόμενο delay. Κάθε κινητήρας όταν ξεκινά από θέση ακινησίας επιταχύνει σιγά σιγά (μεταβάλλοντας το delay) μέχρι την ομαλοποίηση της κίνησης και όταν φτάσει κοντά στο σημείο τέλους επιβραδύνει μέχρι το τέλος της διαδρομής. Έτσι μπορούμε να επιτύχουμε την μέγιστη ταχύτητα χωρίς να χάσουμε βήμα.. Περιβάλλον χρήστη (user
interface)
Το πρόγραμμα έχει 2 κύριες φόρμες. Η πρώτη περιλαμβάνει μενού, δεξιά παράθυρο που εμφανίζονται πληροφορίες κίνησης κατά την διάρκεια της λειτουργίας των κινητήρων, αριστερά υπάρχει ομάδα Button για τον έλεγχο των κινήσεων (Start, Stop, Pause, Continue) κλπ. 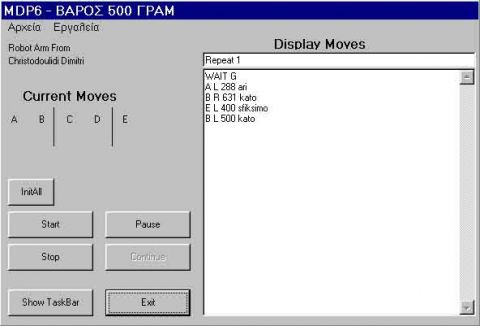 Φωτογραφία της πρώτης
φόρμας.
Η δεύτερη φόρμα υποστηρίζει την λειτουργία
εκμαθείσης (Learn). Περιέχει πολλά μικρά παράθυρα όπου παρακολουθούμε τα
διάφορα γεγονότα, τον αριθμό βημάτων του κάθε κινητήρα, την σχετική και
την απόλυτη κίνηση κάθε κινητήρα. Με 10 πλήκτρα από το πληκτρολόγιο
οδηγούμε τον βραχίονα του ρομπότ στις θέσεις που θέλουμε και αποθηκεύουμε
την ομάδα κινήσεων σε εξωτερικό ASCII αρχείο για περαιτέρω επεξεργασία.
Έχουμε την δυνατότητα να επεξεργαστούμε αυτό το αρχείο ASCII με το
σημειωματάριο ή άλλον επεξεργαστή κειμένου και να κάνουμε αλλαγές,
διορθώσεις, διαγραφές και προσθήκες νέων κινήσεων , να αλλάξομε το MODE,
να αλλάζουμε το delay μεταξύ των βημάτων να ορίσουμε τον αριθμό των
επαναλήψεων κλπ. Αργότερα μέσω της πρώτης φόρμας μπορούμε να φορτώσουμε
αυτό το αρχείο και να τρέξουμε τις κινήσεις.
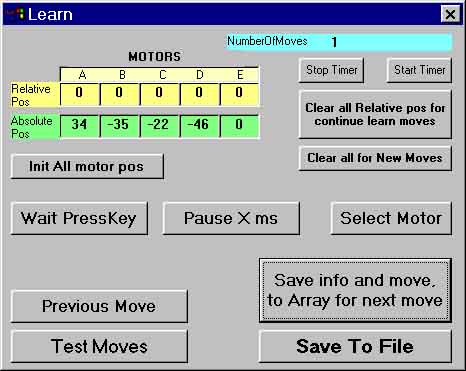 Φωτογραφία της δεύτερης
φόρμας.
Ένα τυπικό αρχείο κινήσεων έχει την
κάτωθι μορφή.
[GENERALINFO] INFO1 = Το όνομα της κίνησης [SETUP] NUMBEROFMOVES = 10 NUMBEROFPARAMETERS = 7 NUMBEROFREPEAT = 1 NUMBEROFSTARTREPMOV = 1 [MOVES] 1 = A,L,280,5,N,S,κίνηση αριστερά για να ανοίξω τον διακόπτη. 2 = B,R,1110,3,N,S,κάτω 3 = C,R,400,3,N,S,εμπρός 4 = A,R,30,5,N,S,τώρα ανοίγω τον διακόπτη 5 = A,L,30,5,N,S,αριστερά για να σφίξω το μπρίκι 6 = PAUSE,10000,,,,,περιμένω 10 sec 7 = B,L,300,3,N,S,πάνω 8 = A,R,38,5,N,S,δεξιά 9 = WAIT,G,,,,,περιμένω μέχρι να πατηθεί το πλήκτρο G 10 = B,R,100,3,N,S,κάτω Ανάλυση του αρχείου και οι παράμετροι. Το τμήμα [GENERALINFO] περιέχει το στοιχείο INFO1 όπου εμφανίζεται το όνομα που δίνουμε στην λειτουργία αυτή. Το τμήμα [SETUP] περιέχει 5 παραμετροποιημένα υποστοιχεία. NUMBEROFMOVES = πόσες κινήσεις έχει το αρχείο NUMBEROFPARAMETERS = κάθε κίνηση πόσες παραμέτρους έχει. NUMBEROFREPEAT = πόσες επαναλήψεις θα κάνει. NUMBEROFSTARTREPMOV = από ποια κίνηση θα αρχίσει τις επαναλήψεις. Το τμήμα [MOVES] περιέχει όλες τις κινήσεις. Ανάλυση των 7 παραμέτρων στο τμήμα [MOVES]. Ο πρώτος αριθμός είναι ο αύξων αριθμός της κίνησης-εντολής. Μετά το = ακολουθούν οι 7 παράμετροι. 1η παράμετρος, το ποιος κινητήρας A,B,C,D,E 2η παράμετρος, η κατεύθυνση του κινητήρα L,R 3η παράμετρος, ο αριθμός των βημάτων. 4η παράμετρος, το DELAY ανάμεσα στα βήματα σε ms 5η παράμετρος, το Ν, Ι. Ν= Νορμάλ, Ι = Initialisation (αρχικοποίηση, αναγνωρίζει την μηδενική θέση με την βοήθεια των αισθητηρίων και σταματά). 6η παράμετρος, το S, C. S= Solo - μόνος, C= concurrent - ταυτόχρονη κίνηση κινητήρων, κάθε κινητήρας σε δικό του νήμα.). 7η παράμετρος, σχόλια για την κίνηση και ότι άλλη πληροφορία θέλουμε. Έχουμε και 2 εντολές που μπορούμε να βάλουμε ενδιάμεσα και μας διευκολύνουν αφάνταστα. Χ = PAUSE,10000,,,,,περιμένει το πρόγραμμα 10 sec ή όσο βάλω (ο αριθμός σε ms) και μετά συνεχίζει. X = WAIT,G,,,,,περιμένει μέχρι να πατηθεί το πλήκτρο G, ή όποιο πλήκτρο επιλέξω. Πολύ σημαντική εντολή διότι μπορεί να ενεργοποιηθεί το Ρομπότ από κάποιο εξωτερικό γεγονός και να συνεχίσει την εργασία του όταν πρέπει. Φυσικά μπορεί να μην είναι πλήκτρο αλλά κάποιο αισθητήριο με ψηφιακή έξοδο ή κάποιος διακόπτης. Το πρόγραμμα έχει αυτήν την δυνατότητα. Άλλες πληροφορίες και δυνατότητες του προγράμματος Το πρόγραμμα είναι γραμμένο έτσι ώστε να
υποστηρίζει όταν χρειάζεται Multithread (πολυνηματική
εφαρμογή) με την συνάρτηση API των Windows CreateThread Έχει την
δυνατότητα κάθε κινητήρας όταν θέλουμε (μέσω ρύθμισης των παραμέτρων στο
εξωτερικό ASCII αρχείο) να τρέχει σε ξεχωριστό νήμα και έτσι επιτυγχάνουμε
ταυτόχρονη κίνηση των μοτέρ. Αυτή η λειτουργία λόγω περιορισμού του
Hardware της εσωτερικής κάρτας έχει περιορισμένη απόδοση (μόνο 3 κινητήρες
μπορούν να κινηθούν ταυτόχρονα και όχι όποιοι θέλουμε) επειδή αυτή η
λειτουργία δεν είναι ουσιαστική για την περίπτωση μας δεν την χρησιμοποιώ
στα DEMO.
Η εξωτερική δυναμική Βιβλιοθήκη για τα I/O είναι η WinIo.dll και οι κυριότερες συναρτήσεις είναι η SetPortVal και η GetPortVal. Τρέχει σε περιβάλλον Win98, W2k, XP. Ο Ηλεκτρονικός υπολογιστής
(PC)
 Ο Ηλεκτρονικός Υπολογιστής όπως φαίνεται και
από την φωτογραφία είναι μόνο για πειραματισμούς και για ευκολία άμεσης
πρόσβασης στο εσωτερικό του έχω βγάλει εντελώς όλα τα καπάκια. Έτσι πρέπει
να είναι ο υπολογιστής των εργαστηρίων. Τον έχω πολλά χρόνια και με
έβγαλε ασπροπρόσωπο πολλές φορές και ακόμα κρατά. Φορά τον
επεξεργαστή Pentium 166 MHZ. Το πρόγραμμα δεν έχει μεγάλες απαιτήσεις
επεξεργαστικής ισχύος, αλλά όσο πιο γρήγορος είναι τόσο καλύτερα. Σε
ταχύτερο υπολογιστή θέλει να κάνουμε μερικές μικρές αλλαγές στο πρόγραμμα.
με κυριότερη τις εσωτερικές καθυστερήσεις (delay). Το λειτουργικό είναι
Win98 και έχει μνήμη RAM 64 ΜΒ.
Σύνθετες κινήσεις σε
VIDEO
Πριν καιρό έλεγα μέσα μου. Θα το μάθω να κάνει καφέ. Τώρα αυτό πραγματοποιήθηκε. Κάθε πρωί εδώ και ένα μήνα το ρομποτάκι μου με το μαγικό του χέρι μου έψηνε Ελληνικό καφέ. Περάσαμε θαυμάσια. Επειδή είναι αδύνατο να γράψω την
Βιβλιογραφία, αντί για αυτό έχω μια φωτογραφία με ένα μέρος της τεχνικής
βιβλιοθήκης μου.
 Στην σύζυγο μου
Κατερίνα
και στους γιούς μου Βαγγέλη και
Αργύρη.
Τους εύχομαι να κατασκευάσουν ένα ρομπότ που να γελά και να σκορπάει χαμόγελα
παντού.
Απο τον Χριστοδουλίδη
Δημήτρη (robodim)
Αυτή η διεύθυνση ηλεκτρονικού ταχυδρομείου προστατεύεται από κακόβουλη
χρήση. Χρειάζεται να ενεργοποιήσετε την Javascript για να τη δείτε.
http://www.devell.gr Σχόλια (15)
dikos said:
|

| Έχω μείνει
άφωνος με την κατασκευή σου αλλά πιο πολύ με την ιδέα, επιτέλους ένα
ρομπότ που φτιάχνει καφέ…και μάλιστα Ελληνικό. Συγχαρητήρια!!! |
nick-themachine said: 
| Ο δικός
μου βραχίονας φτιάχνει φραπέ, ο δικός σου ελληνικό, το μόνο που
μένει είναι να κατασκευάσουμε ένα ρομπότ που να μπορεί και να τον
διαβάζει Πολύ καλή και μπελαλίδικη η δουλειά σου!!! Βασικά ο βραχίονάς σου είναι ένα σφαιρικού τύπου ρομπότ manipulator με κινηματική RRTR. Δεν κρύβω πως οι βραχίονες είναι οι αγαπημένοι μου, γι'αυτό το λόγο επέλεξα να κατασκευάσω ρομποτικούς βραχίονες για τα δύο πρώτα μου project Συγχαρητήρια!!!!!!! |
orfeus said:
| Το σίγουρο
είναι ότι θα αποστόμωνες όποιον ρώταγε το γνωστό ... "Καφέ κάνει
???" .... Σε καλωσορίζω και εγώ με την σειρά μου στην παρέα μας. Περιμένω την επόμενη κατασκευή σου. Καλή συνέχεια και καλή επιτυχία . |
robodim said:
| Αγαπητοί
μου φίλοι, DIKOS, NICK-THEMACHINE , MORFEAS, ORFEUS και όλη την παρέα, εγώ έτσι σας θεωρώ χωρίς να σας ξέρω. Άνθρωποι που ασχολούνται δημιουργικά είναι από καλή πάστα, άλλου επιπέδου. Ξέρω ότι όπου και αν είστε όπου και αν σταθείτε το μυαλό σας κάτι σκέφτεται και κατεβάζει ιδέες, αλλιώς βλέπει τον κόσμο, βλέπει μπροστά. Σας ευχαριστώ για τα θετικά σχόλια σας και για την ανοιχτή αγκαλιά που μου προσφέρατε. Οι κατασκευές σου NICK, NEREUS και HERON μου άρεσαν πολύ και ιδιαιτέρως το ψαράκι. Μπράβο σου. Αρίστη κατασκευή. Και πάλι ευχαριστώ. Θα τα λέμε τακτικά. Δημήτρης. |
minas11 said:
| Δημητρη συγχαρητηρια για τον βραχιονα σου πραγματικα "ξετραλαθηκα" τον τροπο που φτιαχνει καφε... συννεχισε ετσι και περιμενουμε και αλλεςλατασκευες σου... |
Tricky
Nekro said:
| Ο μόνος
λόγος που δεν το παραδέχομαι είναι γιατί φτιάχνει ελληνικό αντί για
φραπέ... χεχεχε Πλάκα κάνω φυσικά... Απλά υπέροχο... χίλια μπράβο... Λευτέρης |
robodim said:
| Αγαπητοί
minas11 και Tricky Nekro. Σας ευχαριστώ για καλά σας λόγια που μου δίνουν φτερά. Πάντα δικός σας. Δημήτρης. |
ΑΔΑΜΟΠΟΥΛΟΣ said:
| Αγαπημένε
μου πρώην συνάδελφε και ες αεί φίλε Δημήτρη, το προοδευτικό σου
μυαλό πάντοτε είχε απίστευτα αποτελέσματα.Όπως και τώρα μετο robot σου που φτιάχνει καφέ.Το καλό πού σου θέλω είναι: άνοιξε ένα robotInternet cafe! Βέβαια εννοείται πως κάποια στιγμή θα μπορέσω και γω να βοηθήσω, ενσωματώνοντας στο robot τα θαύματα που έχω εξηγήσει (να τα λέει δηλ. το robot) τι λες; πολλά πολλά συγχαρητήρια ΔΗΜΗΤΡΗΣ |
robodim said:
| Δημήτρη
ευχαριστώ. Θα τα πούμε από κοντά. Μέσα απο το grobot σου έστειλα και εμαιλ. Πες μου αν το πήρες. Καλό βράδυ. Δημήτρης Χ |
Aggelos said:
| Αγαπητέ
Δημήτρη, Είδα και θαύμασα την κατασκευή σου. Έχεις κάνει αρκετές προσθήκες σε σχέση με την παλαιότερη έκδοση του. Η όλη κατασκευή είναι πολύ ενδιαφέρουσα και η ανάλυση της με κάθε λεπτομέρεια, νομίζω ότι είναι άξια επαίνου. Το μόνο που απομένει είναι να ευχηθώ καλή επιτυχία και καλή συνέχεια γιατί το μικρόβιο υπάρχει και οπωσδήποτε θα υπάρξει συνέχεια. Όσο για τις υπόλοιπες κατασκευές νομίζω ότι είναι εξίσου αξιόλογες με διαφορετική προσέγγιση σε θέματα ρομποτικής. Καλή επιτυχία σε όλους. Με θερμούς χαιρετισμούς Άγγελος |
robodim said:
| Άγγελε
φίλε μου ευχαριστούμε. Πράγματι κάθε κατασκευή έχει απο κάτι πρωτότυπο και διαφορετικό. Να ξέρης ότι απο τώρα είσαι μέλος του grobot.gr Γράψε κάπου τους κωδικούς για να μην τους ξεχάσεις. Στο site θα βρεις πολλά ενδιαφέροντα θέματα. Να είσαι καλά. Δημήτρης |
Morfeas said:
| για μένα
τώρα που τελείωσε ο διαγωνισμός συγχαρητήρια το αυτό..... Στην σύζυγο μου Κατερίνα και στους γιούς μου Βαγγέλη και Αργύρη. Τους εύχομαι να κατασκευάσουν ένα ρομπότ που να γελά και να σκορπάει χαμόγελα παντού. |
argiris said:
|
Μπράβο
Δημήτρη, συγχαρητήρια! Έκανες καλή δουλειά, εντυπωσιάστηκα Ελπίζω η δεύτερή σου έκδοση - βελτίωση να έχει έστω και υποτυπώδη αναγνώριση εικόνας με τεχνητή νοημοσύνη ώστε να γίνονται όλα αυτόματα!!! |
|
 Μπράβο
Δημήτρη, συγχαρητήρια!
Μπράβο
Δημήτρη, συγχαρητήρια!